SUMACO | Temperature Drift & Scale Factor: The Two Keys to IMU Error Modeling

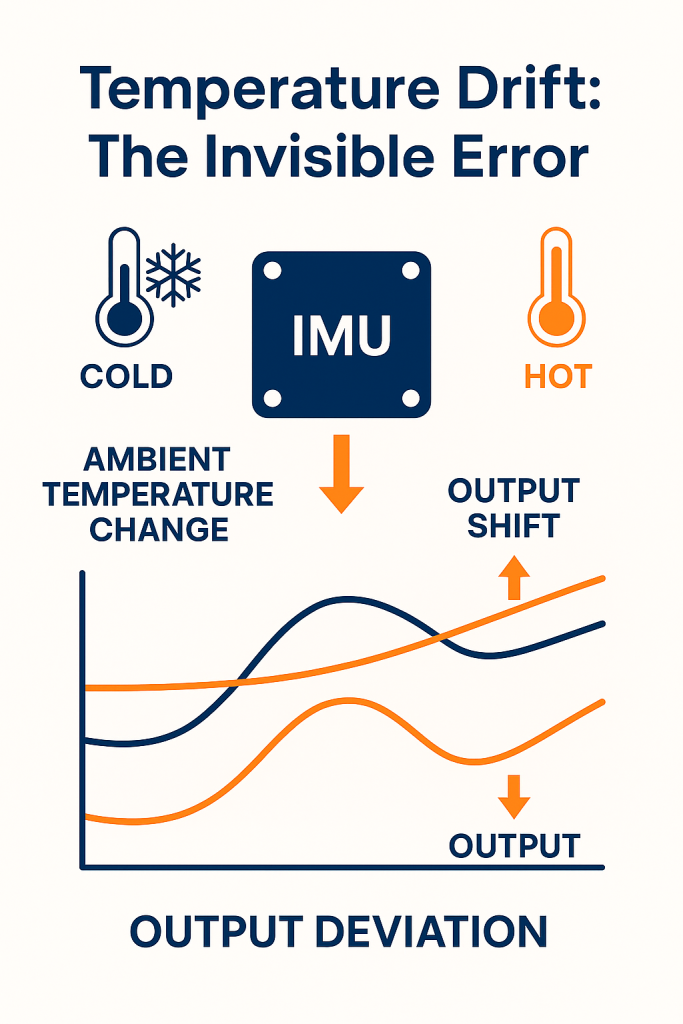
I. When Temperature Becomes an “Invisible Error”
In an ideal world, the angular velocity and acceleration measured by an IMU would perfectly match real-world motion.
In reality, however, any change in temperature alters the characteristics of the sensing elements —
crystal stress, solder joint expansion, and amplifier circuit drift
all cause the measured output to “subtly deviate” from the truth.
This deviation may not be immediately noticeable,
but after a vehicle travels a few kilometers or a robot operates for a few minutes, the errors accumulate steadily.
Temperature Drift
is one of the root causes that makes an inertial navigation system appear stable on the surface — while quietly losing accuracy underneath.
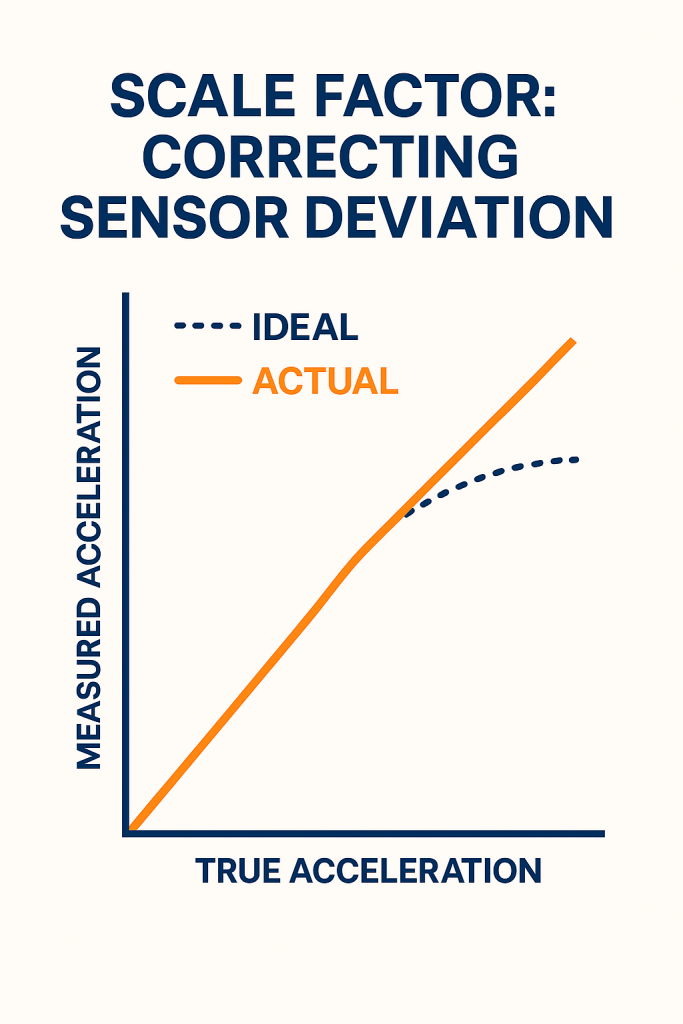
II. Scale Factor: Every Degree of Tilt Must Be Precisely Accounted For
Beyond temperature drift, there is another hidden yet critical factor — the Scale Factor.
It defines the proportional relationship between the sensor’s output value and the true physical quantity being measured.
Imagine measuring a distance with a ruler that stretches ever so slightly:
each individual segment is only off by a tiny amount, but the more you measure, the larger the cumulative error becomes.
The same kind of proportional bias exists in an IMU. An ideal accelerometer output should be perfectly linear, but in practice, due to circuit characteristics, mechanical structure, and aging effects, the response curve often bends or distorts slightly. This is where scale factor correction becomes essential — recalibrating the IMU’s internal “ruler” back to a true standard.
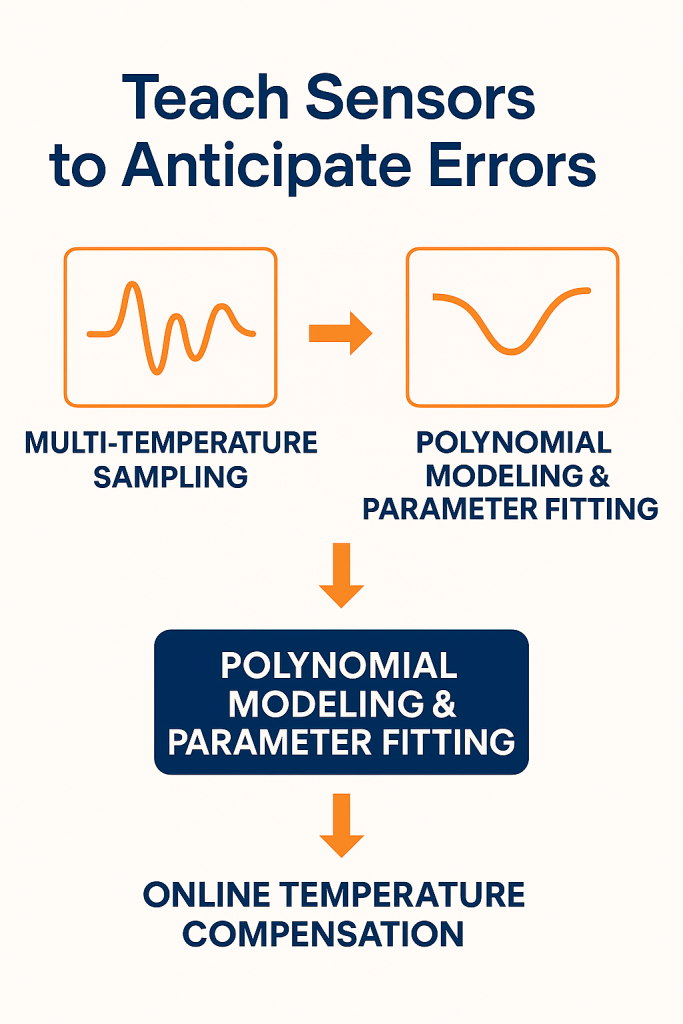
III. The Art of Modeling: Turning Chaos into Predictability
The SUMACO series IMU employs a proprietary error modeling framework that performs integrated correction of both temperature drift and scale factor.
The core methodology consists of:
- Multi-temperature calibration: Recording sensor responses across the full range of -40°C to 85°C;
- Parameter fitting: Constructing an error model that maps temperature to output deviation;
- Online compensation: Dynamically reading temperature during operation and applying real-time corrections using the model.
This process is like giving the sensor a “brain” —
one that knows exactly what errors it will introduce as it heats up or cools down, and actively cancels them out.
This modeling approach is not limited to individual units.
By analyzing production data at scale, the coefficient templates can be progressively refined across entire production batches,
making “stability” a result that can be manufactured consistently at volume.
IV. Controllable Error Is the Foundation of a Reliable System
In the context of automotive-grade applications, an IMU does not pursue “zero error” — it pursues Controllable Error. True stability comes from understanding, modeling, and managing errors. SUMACO therefore treats error as a characteristic to be engineered and shaped, not a defect to be concealed.
During factory testing, every SUMACO IMU undergoes:
- Closed-loop validation across multiple temperature points;
- Dynamic scale factor testing;
- Residual evaluation of data fitting results — ensuring that the final output maintains consistent characteristics across all temperature ranges and all dynamic operating scenarios.
This is also one of the core meanings of “automotive-grade” —
it is not about who is most sensitive, but about who is most predictable.
V. Stability Is Built on Understanding
When a system understands the conditions under which it will “make mistakes,”
it moves closer to genuine intelligence.
SUMACO’s temperature drift and scale factor models
give that intelligence a physical foundation.
From hardware to algorithms, from raw data to refined models,
stability is no longer merely a product specification —
it is the capacity to understand and adapt to a changing world.
Because only by understanding change
can a system remain constant in the face of it —
and that is precisely the value of an automotive-grade IMU.
About MCT
MCT is an innovative company focused on attitude sensing and absolute positioning for the Physical AI era. With artificial intelligence as our core technology, we adopt a “data-driven, hardware-software integrated” strategy to develop and deliver comprehensive attitude sensing and absolute positioning solutions — serving the fields of embodied intelligence, urban assisted driving, low-altitude economy, robotics, and intelligent devices. Built on our proprietary automotive-grade BeiDou high-precision chips and modules, and integrating high-precision IMU, vision, and radar sensor technologies alongside large-scale data, MCT provides more reliable, safer, and more precise technical support for autonomous planning and automatic control, continuously enhancing the spatial awareness capabilities of intelligent platforms.
Want to learn more about MCT’s latest developments?
Visit www.mctech.ai / www.mctai.cn, or follow our WeChat Official Account: “毫厘智能 MCT”.