MOJANDA Series · Part 1: Why High-Precision Positioning Cannot Exist Without Time
Time Is the Starting Point of All Precision
Determining “where am I” on Earth may seem straightforward — but in reality, it is a race against time.
GNSS (Global Navigation Satellite System) does not directly provide your coordinates. Instead, it asks the receiver to “solve for time differences.”
The moment a satellite transmits a signal, it carries an extremely precise timestamp.
By calculating the arrival time of signals from each satellite, the receiver can derive its distance to that satellite.
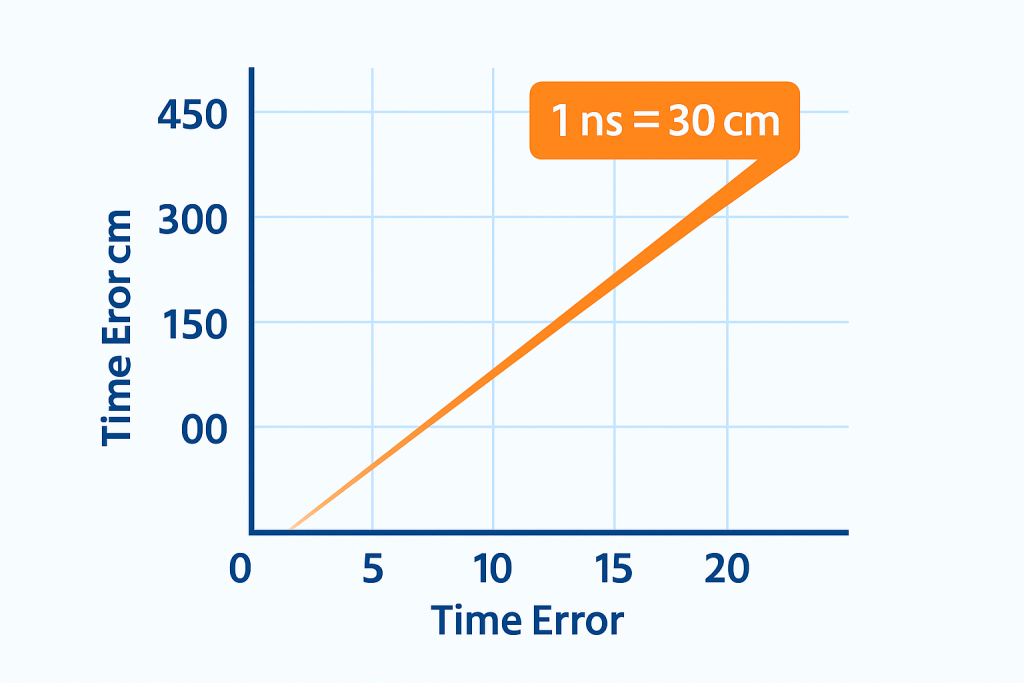
If the time difference is off by just 1 nanosecond, it translates to a 30 cm ranging error. Let that error accumulate to 10 nanoseconds, and the vehicle’s position drifts by 3 meters. For the chip, therefore, “time” is not merely a reference variable — it is the absolute origin of every spatial coordinate.
The Essence of Precision: Nanosecond-Level Time Synchronization
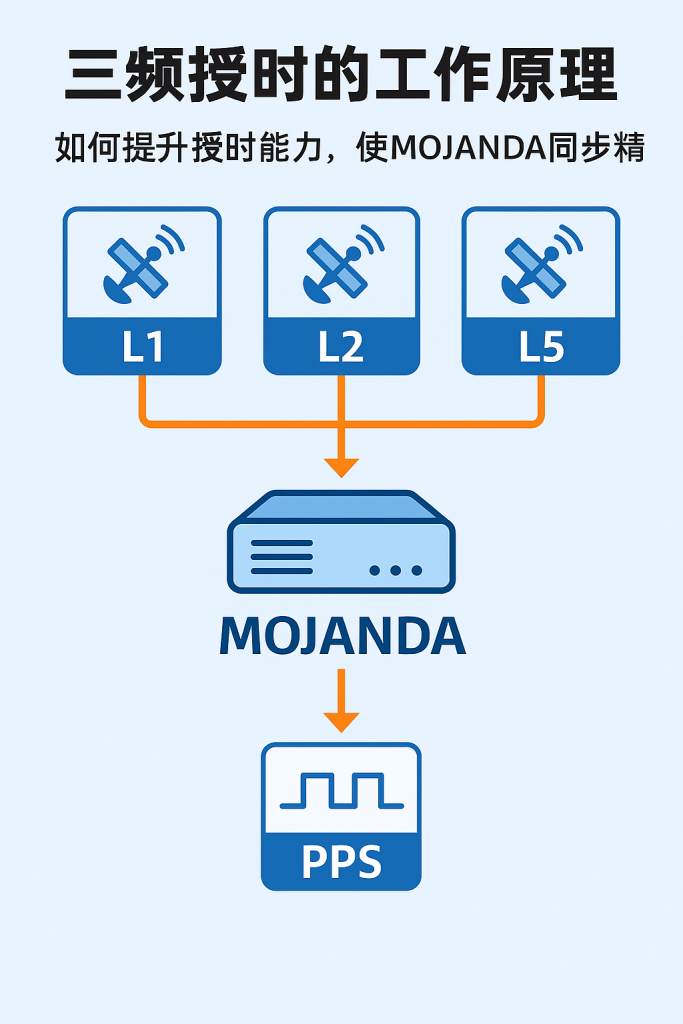
The reason MOJANDA can achieve centimeter-level positioning lies at its core in its time synchronization system. It uses triple-frequency signals (L1, L2, L5) to cross-correct one another, achieving nanosecond-level locking of timing offsets.
- L1 band provides the fundamental ranging signal;
- L2 band is primarily used to correct ionospheric delay;
- L5 band improves the signal-to-noise ratio through higher bandwidth.
Triple-frequency data is fused by an internal timing module and continuously adjusted by a Phase-Locked Loop (PLL), keeping the clock stable within ±5 nanoseconds.
Throughout this process, the chip’s internal Temperature-Compensated Crystal Oscillator (TCXO) continuously monitors thermal drift, preventing long-term bias caused by Clock Drift.
Think of MOJANDA as a “nanosecond factory” —
every signal stream is precisely timestamped,
and every positioning solution stays synchronized with the satellites’ atomic clocks.
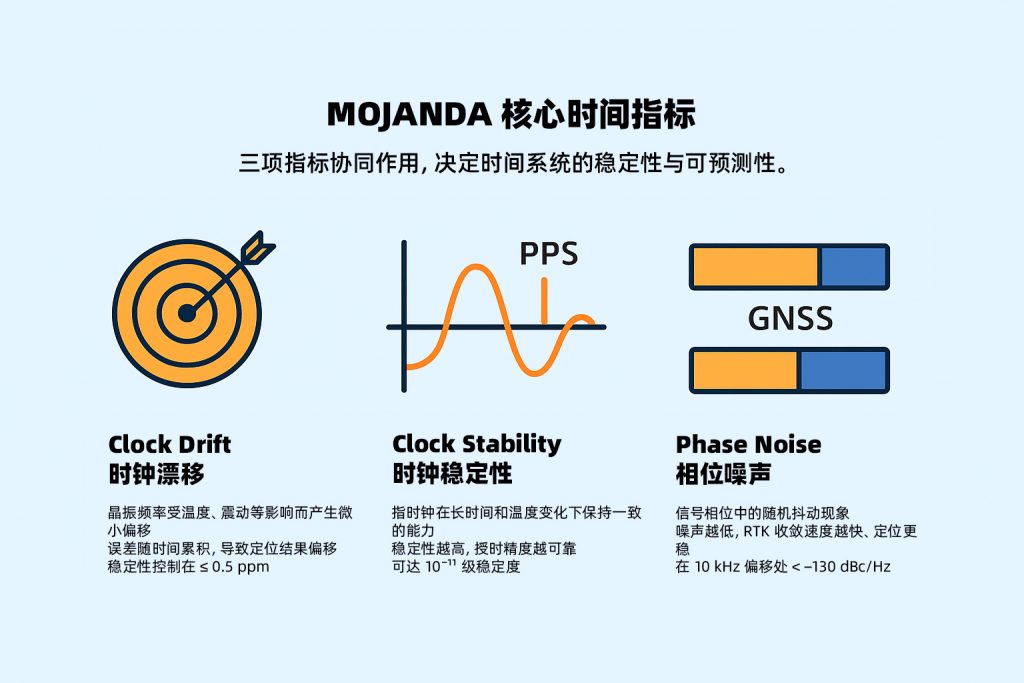
Key Concepts: Drift, Stability, and Noise
Before fully understanding high-precision positioning, it is essential to grasp three subtle but critical concepts.
① Clock Drift refers to the slight frequency deviation that a crystal oscillator develops due to temperature, aging, and vibration — typically measured in ppm (parts per million). MOJANDA applies dual-stage calibration via TCXO and PLL to achieve drift control of ±0.5 ppm across the full operating temperature range (−40°C to 105°C). This means even when a vehicle operates in extreme climates over extended periods, it maintains a reliable clock frequency and ensures GNSS positioning accuracy at high speeds.
② Clock Stability is the crystal oscillator’s ability to maintain a constant frequency, encompassing both short-term and long-term stability. MOJANDA’s long-term aging rate is as low as ±1 ppm/year — meeting the demands of long-duration vehicle use, ensuring timestamp alignment accuracy across radar, cameras, and other multi-sensor systems throughout the vehicle’s lifecycle, and preventing data fusion errors caused by long-term aging. For short-term stability, optimized oscillator circuitry and PLL design provide a stable and reliable time reference for multi-sensor fusion.
③ Phase Noise is the random noise superimposed on a clock signal, expressed in dBc/Hz. The less “jitter” in the signal, the more easily the carrier phase can be locked. MOJANDA’s phase noise at a 1 kHz offset is below −130 dBc/Hz, enabling faster and more stable RTK initialization.
These specifications may appear dry, but every single figure directly determines whether a vehicle or drone can “exist precisely” in the real world.
System Synergy: Making Every Sensor “Breathe in Unison”
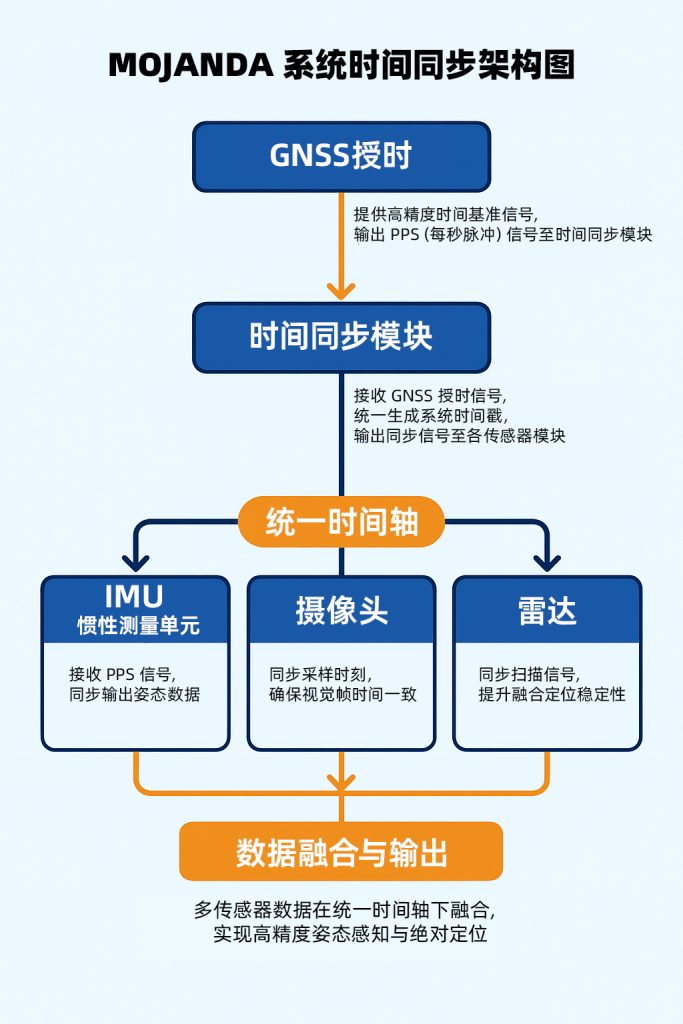
Time synchronization is not only critical to GNSS itself — it also governs the fusion performance of the entire system.
Within MCT’s architecture, the high-precision timing signal output by MOJANDA simultaneously calibrates the sampling timing of the SUMACO IMU and the fusion sequencing of the REVENTADOR algorithm.
This relies on a pulse signal known as PPS (Pulse Per Second). It emits one “heartbeat” per second, aligning GNSS, IMU, vision, and LiDAR to the exact same moment in time. When this data is fed into the fusion algorithm, the timestamps across all sensors are perfectly consistent.
In scenarios such as autonomous vehicle braking, drone attitude adjustment, and robotic obstacle avoidance,
this cross-module “time unification” allows the system to operate like a single living organism —
making decisions within milliseconds, rather than reacting sluggishly amid temporal chaos.
Why MCT’s Time Management Is Smarter
Most GNSS chips perform time synchronization only at the signal level. MCT elevates “time” to a system-wide discipline.
Within MOJANDA, the timing module, differential engine, and multi-source interfaces are all managed by a unified AI algorithm:
- It dynamically judges which signals are trustworthy (e.g., using IMU to predict time drift when GNSS signals are weak);
- It achieves millisecond-level timestamp fusion across multiple modules;
- It feeds historical drift data back into the system, driving data-informed calibration strategies for subsequent cycles.
This is what MCT means by “hardware-software integration” —
hardware provides a stable time reference; software makes time intelligent.
Time is no longer a passive measurement — it becomes a variable that can be learned and optimized.
At the End of Time Lies Spatial Certainty
When an autonomous vehicle re-acquires satellite signals at the exit of a tunnel,
it can instantly restore precise positioning — made possible by the time synchronization state accumulated over the preceding minutes.
Behind this capability, every nanosecond of MOJANDA is continuously at work,
providing spatial intelligence with the most reliable “absolute scale.”
Spatial certainty begins with time;
and time stability is safeguarded by MOJANDA.
About MCT
MCT is an innovative company focused on attitude sensing and absolute positioning for the Physical AI era.
With artificial intelligence at our core, we pursue a “data-driven, hardware-software integration” strategy
to develop and deliver comprehensive hardware and software solutions for attitude sensing and absolute positioning,
serving sectors including embodied intelligence, urban assisted driving, low-altitude aviation, robotics, and smart devices.
Built on our proprietary automotive-grade BeiDou high-precision chips and modules,
we integrate high-precision IMU, vision, and LiDAR sensor technologies with large-scale datasets
to deliver more reliable, safer, and more accurate technical support for autonomous planning and automated control,
continuously enhancing the spatial perception capabilities of mobile platforms.
Want to learn more about MCT’s innovations in spatial intelligence and attitude sensing? Visit www.mctech.ai / www.mctai.cn, or follow our WeChat Official Account: “毫厘智能 MCT”.