MOJANDA | From Chip to System: The Significance of Tight Coupling with IMU
From the Horizon to the Millimeter
“Only when signals and motion speak to each other does positioning truly begin to ‘understand’ the world.”
I. Why GNSS Needs IMU — When Signals Are No Longer Enough
The world of GNSS chips is anchored to satellites.
It relies on satellite signals to determine “where it is.”
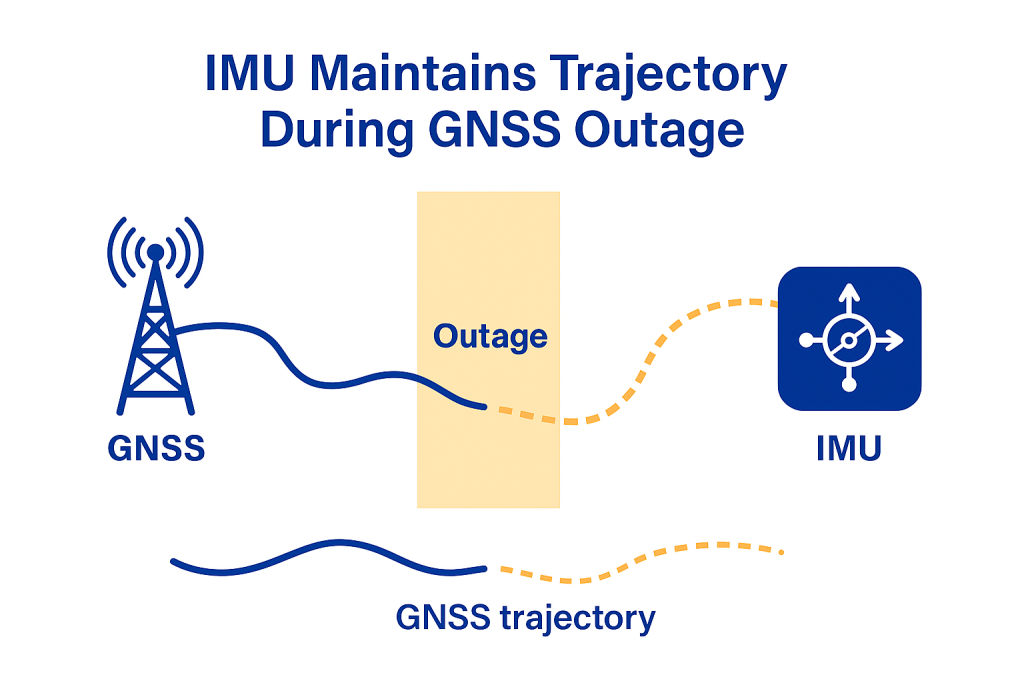
But in real-world environments, those signals are not always available.
Under bridges, inside tunnels, beneath tree canopies, and among urban canyons,
satellite signals are frequently blocked, reflected, or interfered with.
An IMU (Inertial Measurement Unit), on the other hand, captures an entirely different kind of information: the trajectory of motion itself. Independent of any external signal, it uses accelerometers and gyroscopes to infer attitude, velocity, and displacement over very short time intervals.
GNSS tells you “where you are.” IMU tells you “how you got there.” Only when both are fused does a positioning system gain the ability to truly “understand.”
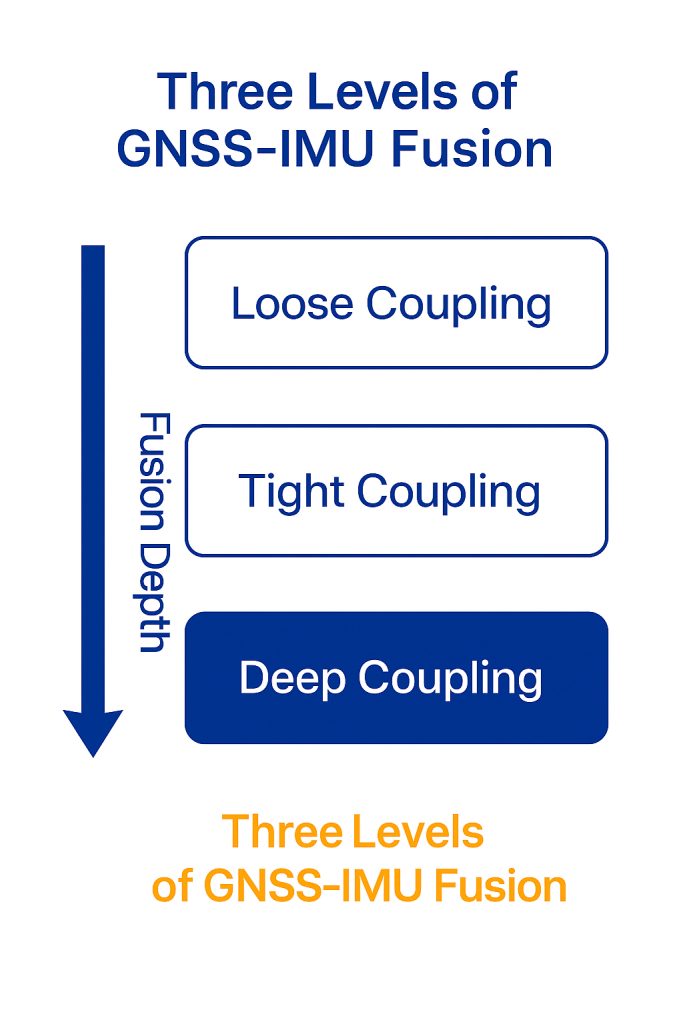
II. Loose Coupling, Tight Coupling, and Deep Coupling: The “Depth” of Fusion
GNSS and IMU integration can be achieved at different levels,
with the key distinction lying in the “depth” of information exchange.
- Loose Coupling: Both systems operate independently, with GNSS providing only position corrections to the IMU. Simple to implement, but slow to respond.
- Tight Coupling: GNSS feeds satellite pseudorange and phase residuals directly into the IMU filter, while the IMU participates in both position prediction and error correction. Faster response and stronger continuity.
- Deep Coupling: Signal-level and inertial-level data are fused, with the IMU feeding real-time attitude back to the GNSS receiver front end for cooperative tracking. Capable of maintaining accuracy even when some satellite signals are interrupted.
The MOJANDA chip currently employs a tight coupling architecture, achieving high-precision real-time performance without relying on a dedicated SoC — striking a practical balance among power consumption, accuracy, and system complexity.
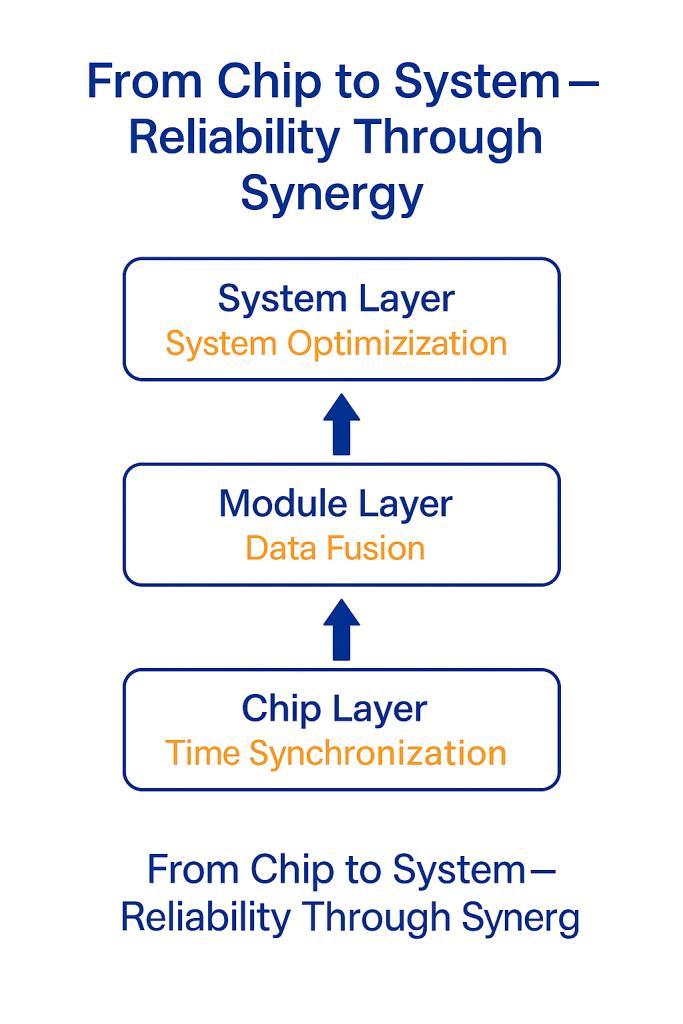
III. MOJANDA’s Tight Coupling Architecture: Data-Driven Real-Time Fusion
Within the MOJANDA chip, tight coupling is not a simple concatenation of data — it is a form of dynamic co-processing:
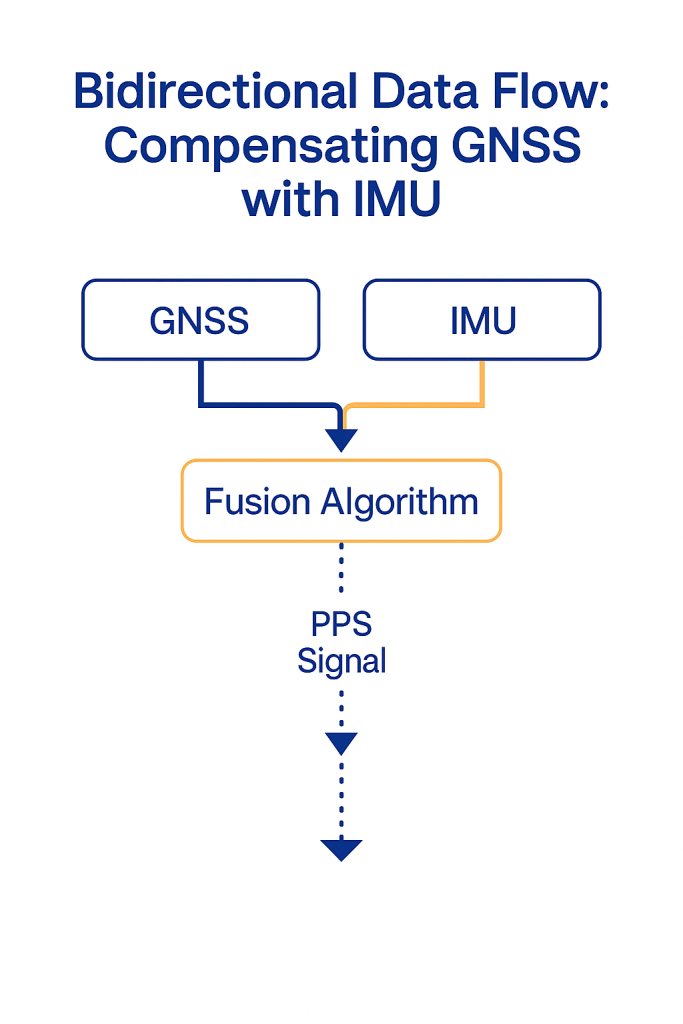
1️⃣ Unified Time Reference (PPS Synchronization) The GNSS timing module outputs a PPS signal that serves as the temporal anchor for the IMU, LiDAR, camera, and other sensors, ensuring that all data is fused along a common time axis.
2️⃣ Bidirectional Data Flow Architecture GNSS feeds measurement residuals into the inertial solver, while the IMU’s attitude predictions are fed back into the GNSS ranging filter — forming a true bidirectional coupling pathway.
3️⃣ Adaptive Kalman Filter The fusion algorithm continuously adjusts the noise covariance matrix in real time, automatically optimizing estimation accuracy in response to dynamic environmental changes.
4️⃣ Edge-AI Fusion Chip-level AI algorithms detect anomalous motion patterns, maintaining positioning continuity during sudden turns, hard braking, or rough terrain.
It doesn’t just fuse data — it fuses the logic of motion itself.
IV. From Chip to System: The Value of Integration
In systems such as vehicles, UAVs, and robots, the performance of a single chip does not determine the performance of the whole. What matters is how it works in concert with other modules.
MOJANDA is designed from the ground up to serve the system.
It provides a stable clock source, standardized timestamp interfaces,
and seamless communication protocols with the SUMACO IMU module.
This design philosophy enables system developers to:
- Build fusion frameworks rapidly — without starting from scratch on synchronization and calibration;
- Reduce algorithmic complexity — minimizing latency and solution jitter;
- Improve system versatility — enabling compatibility across different host controllers and platforms.
From chip to system, true competitive advantage lies not in peak single-point performance, but in “making the entire system easier to operate correctly.”
V. The Meaning of Fusion: Enabling Machines to Truly Understand Space
The essence of spatial intelligence is not “knowing a set of coordinates,” but understanding one’s own state and movement within a three-dimensional world.
GNSS provides “a reference frame for the world,”
IMU provides “a sense of self,”
and together, they form a machine’s “spatial awareness.”
MOJANDA’s tight coupling design
is a critical step toward that goal:
Enabling a positioning system not only to “know where it is,” but to “know how it got there.”
This is more than the fusion of technologies —
it is the starting point for machines to move from “measuring space” to “understanding space.”
About MCT
MCT is an innovative company focused on attitude sensing and absolute positioning for the era of Physical AI.
With artificial intelligence at the core of our technology, we follow a strategy of “data-driven, hardware-software integration”
to develop and deliver comprehensive hardware and software solutions for attitude sensing and absolute positioning,
serving sectors including embodied intelligence, urban-area assisted driving, low-altitude economy, robotics, and intelligent devices.
Built upon our proprietary automotive-grade BeiDou high-precision chips and modules,
and integrating high-precision IMU, vision, and LiDAR sensor technologies alongside large-scale datasets,
we provide more reliable, safer, and more precise technical support for autonomous planning and automated control,
continuously enhancing the spatial perception capabilities of our customers’ platforms.
To learn more about MCT’s latest news and developments, visit www.mctech.ai / www.mctai.cn, or follow our WeChat Official Account: “毫厘智能 MCT”.