MOJANDA | GNSS + IMU: What Dual-Engine Positioning Really Means


1️⃣ Why GNSS Needs “Another Half”
Under open skies, GNSS can precisely tell us “where we are.” But the moment a vehicle enters a tunnel, a tree-lined road, or an urban canyon, signals become blocked, reflected, or lost — and positional continuity is broken. This is when another perception source — one that never loses its way — needs to take the wheel: the IMU (Inertial Measurement Unit).
The IMU relies on no external signals. Using gyroscopes and accelerometers, it continuously measures angular velocity and linear acceleration,
enabling it to keep computing position and attitude changes during brief GNSS outages.
Think of it as a “blind navigator” — pressing forward through the dark, guided purely by inertia and a sense of direction.
2️⃣ A Complementary Pair: How the Two Technologies Work Together
GNSS and IMU operate on fundamentally different principles:
- GNSS: Relies on external signals, computing position through ranging and time synchronization;
- IMU: Relies on internal inertia, deriving attitude and displacement by integrating angular velocity and acceleration.
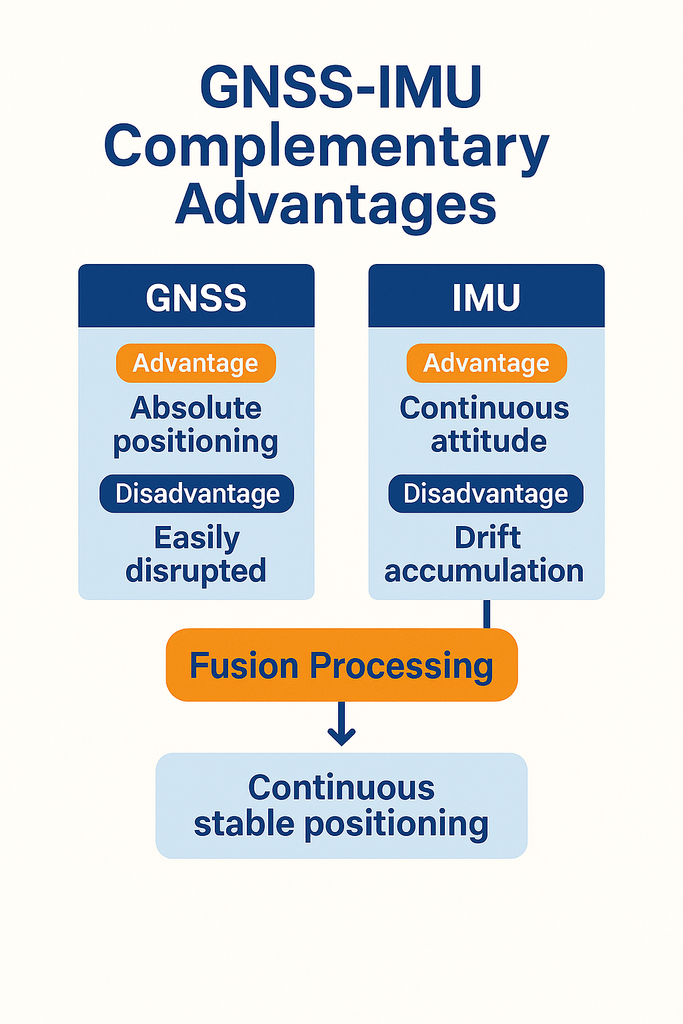
GNSS offers long-term, drift-free positioning — but is highly susceptible to environmental interference.
IMU delivers short-term stability — but accumulates error over time.
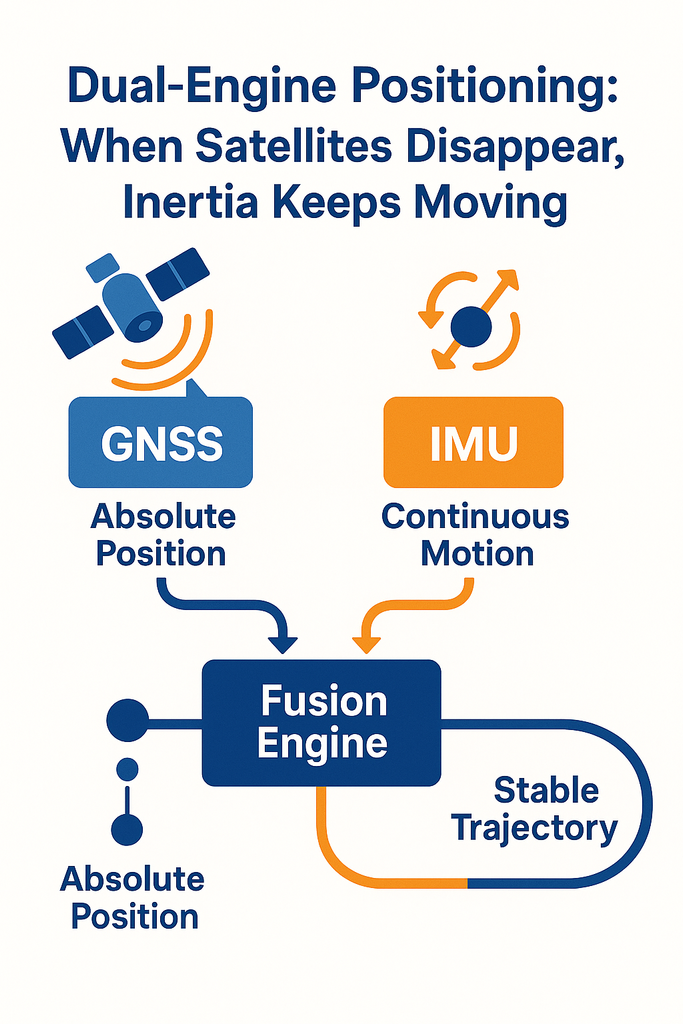
They are, therefore, an ideal complementary pair —
GNSS defines “absolute position,” while IMU maintains “continuous attitude.” When fused together, the system both “knows where it is” and “understands how it’s moving.”
3️⃣ The Power of Tight Coupling: Making Two Worlds Beat as One
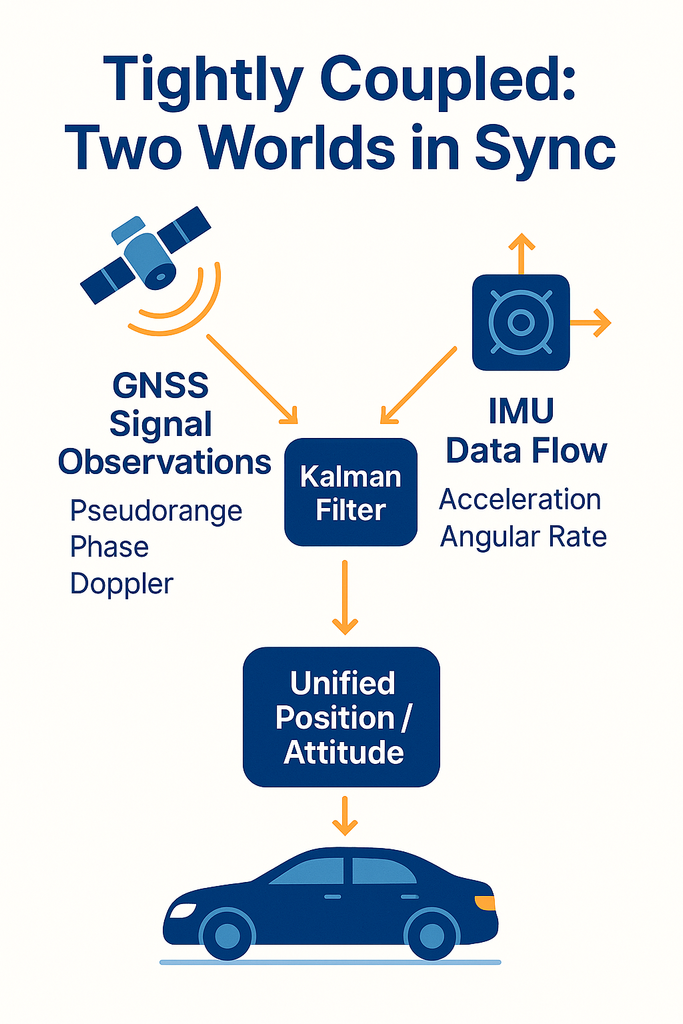
The key to effective fusion is not simply overlaying data — it is establishing a unified reference in both time and space. Within the MOJANDA and SUMACO tightly coupled architecture:
- The GNSS timing signal (PPS) serves as the master time reference;
- The IMU’s inertial data stream is synchronized to the same timestamp;
- Both are fused on the REVENTADOR platform via multi-dimensional Kalman filtering, producing a unified dynamic model.
This architecture is known as “Tightly Coupled” fusion — GNSS no longer simply delivers a position fix; instead, its raw observations are fed directly into the fusion engine. Likewise, the IMU is no longer just an attitude sensor — it becomes the temporal backbone that sustains continuity. The result: even when fewer than four satellites are visible, signals are interrupted, or multipath interference is severe, the system continues to deliver stable, reliable solutions.
4️⃣ From Algorithm to Reliability: Making Fusion Smarter
MOJANDA’s tightly coupled fusion algorithm goes beyond physical-layer data alignment — it achieves true “intelligent selection”:
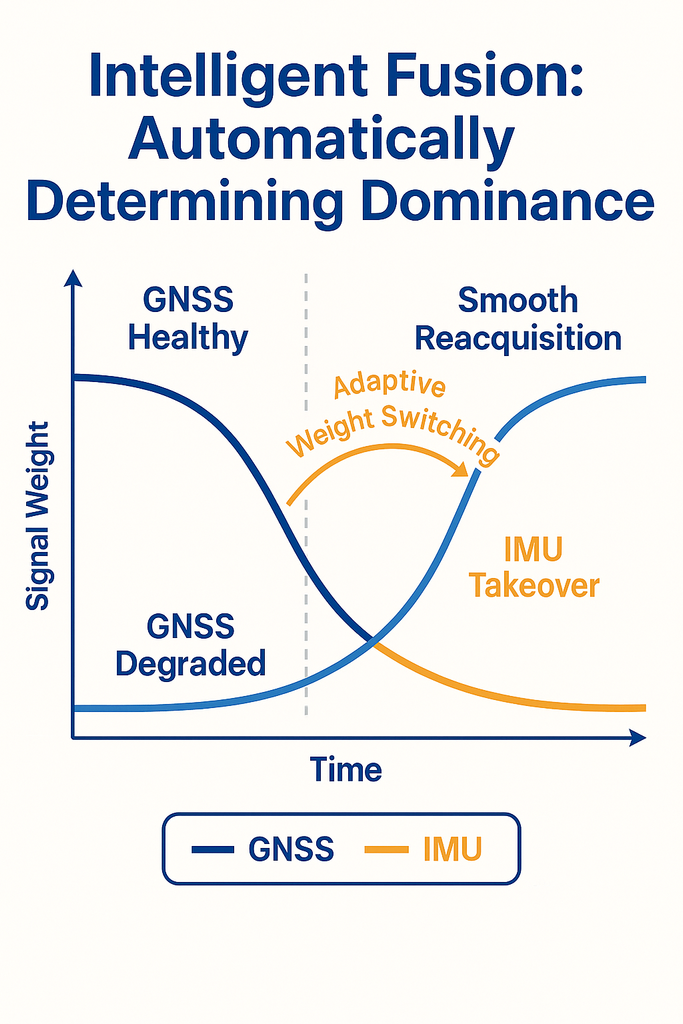
- When GNSS signal quality is high, the system automatically increases the GNSS weighting;
- When GNSS is lost or degraded, the weighting seamlessly shifts to the IMU;
- When conditions recover, the system smoothly transitions back to GNSS-dominant mode.
This adaptive weighting mechanism is enhanced by an AI-assisted filtering algorithm capable of identifying anomalous patterns and predicting drift trends in advance — enabling the system to maintain up to 99.8% trajectory continuity even in challenging environments.
In other words, this is more than fusion — it is collaboration: two sensors mutually calibrating and compensating for each other, together defining a trusted, stable, and continuous spatial reference.
5️⃣ When “Position” Becomes “Perception”
In the traditional sense, GNSS is nothing more than a coordinate system. But when combined with IMU, positioning is no longer a static result — it becomes a cognitive process that evolves over time. This is the essence of spatial intelligence: enabling machines not only to know “where I am,” but to understand “how I got here.”
The tightly coupled architecture of MOJANDA and SUMACO is the embodiment of this philosophy — transforming a positioning system into an integrated perception-and-reasoning organism. This is the critical step from “precise positioning” to “intelligent spatial understanding.”
About MCT
MCT is an innovative company focused on attitude sensing and absolute positioning for the era of Physical AI. With artificial intelligence at the core, MCT follows a “data-driven, hardware-software integrated” strategy to develop and deliver comprehensive attitude sensing and absolute positioning solutions — serving sectors including embodied intelligence, urban-area assisted driving, low-altitude aviation, robotics, and intelligent devices. Built on proprietary automotive-grade BeiDou high-precision chips and modules, MCT fuses high-precision IMU, vision, and LiDAR sensor technologies with large-scale data assets, providing more reliable, safer, and more accurate technological support for autonomous planning and automatic control — continuously advancing the spatial perception capabilities of mobile platforms. To learn more about MCT’s latest developments, visit www.mctech.ai / www.mctai.cn, or follow our WeChat Official Account: “毫厘智能 MCT”.