Chapter 9 | Beyond Navigation: The Next Frontier of Spatial Intelligence

Prologue: The Limits of a Map

Human navigation begins with a map.
A map tells us how to get from one place to another,
but it never tells us why we are going there.
For machines, traditional navigation systems are much like that map —
capable of computing the shortest route, yet unable to comprehend intent.
The future of spatial intelligence is to enable machines not only to “navigate correctly,”
but to “understand the meaning of the journey.”
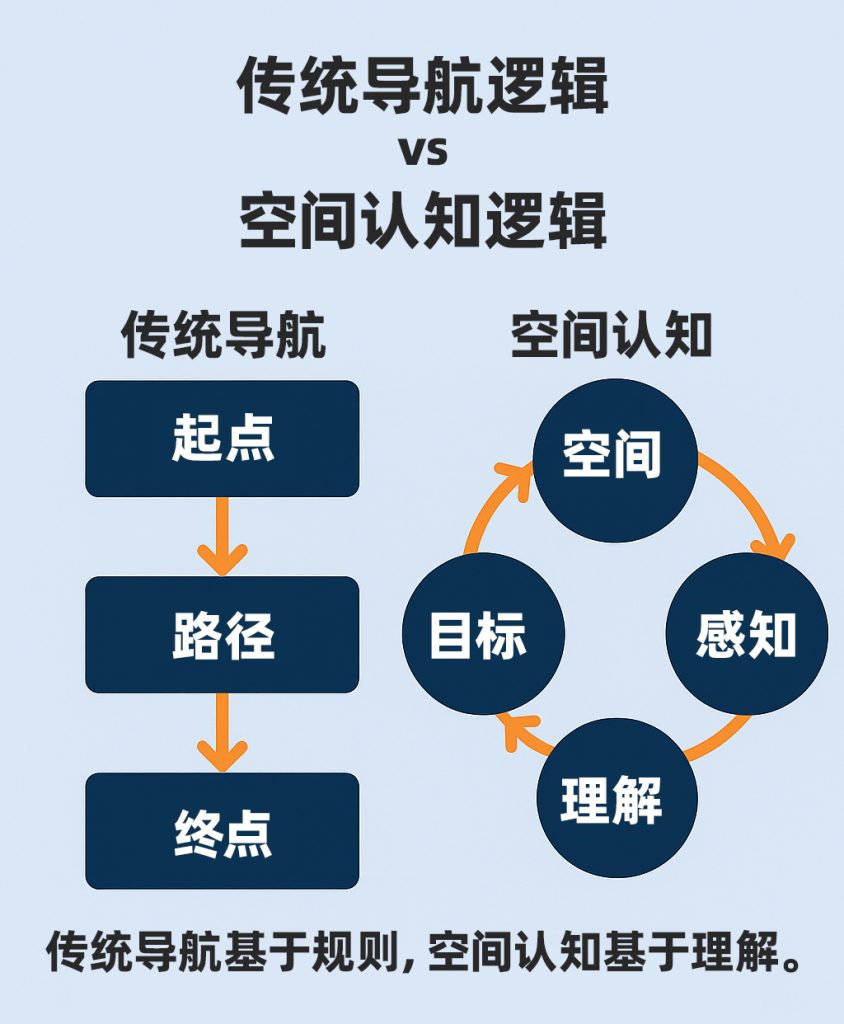
I. Navigation: From Rules to Routes
A traditional navigation system is a strict logic machine.
It relies on coordinates, paths, and constraints.
Feed it a start point and a destination, and it outputs an optimal route.
At this stage, the machine is passive.
It depends on external commands and precise inputs,
with no capacity to understand its environment.
This mode of operation is akin to “navigating blind” —
the path is calculated, not perceived.
The goal of spatial intelligence
is to equip machines with the ability to actively understand space
and make autonomous decisions in an uncertain world.
Navigation is passive computation. Cognition is active understanding.
II. Cognition: Navigating Uncertainty with Meaning
Cognition differs from navigation — it requires “meaning.”
When a robot faces a complex scene —
a slope, an obstacle, or a pedestrian ahead —
it must make a judgment from incomplete and uncertain information.
That judgment is not computed — it is understood. It requires sensor fusion (vision, radar, IMU), environmental memory (maps, historical trajectories), and behavioral reasoning (intent prediction, path reconstruction).
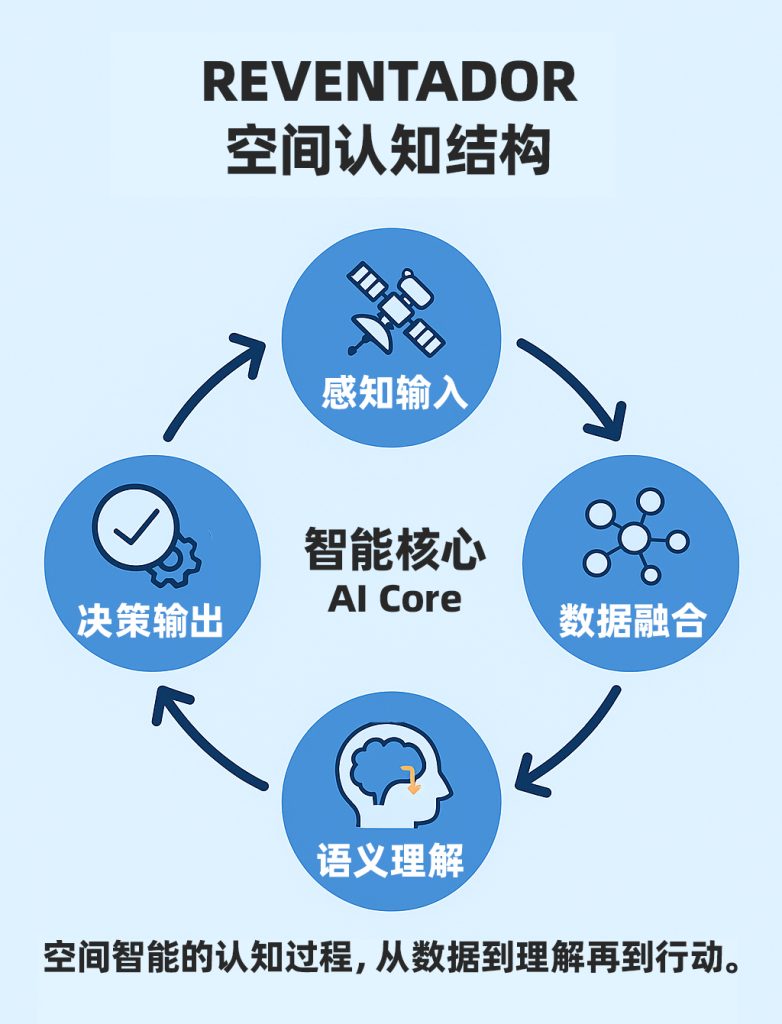
MCT’s REVENTADOR platform is an early embodiment of this “spatial cognition”:
it does not merely fuse data — it uses data to understand “environmental state.”
The system no longer asks only “Where am I?”
It asks: “Where should I go — and why?”

III. Machine “Spatial Awareness”
Philosophically, consciousness means “the perception of one’s own existence.”
For machines, spatial awareness is the first step toward understanding the world.
When GNSS, IMU, vision, and radar together form a continuous spatiotemporal data stream,
algorithms can extract “patterns” and “meaning” from within it.
The machine is no longer merely tracking trajectories — it is learning the logic of its environment.
For example:
- It knows that a road’s gradient affects inertial estimation;
- It knows that sunlight direction can interfere with camera exposure;
- It knows the signal drift patterns characteristic of urban canyons.
This experience-based spatial understanding
elevates the machine from a “perceiver” to a “comprehender.”
IV. From Reaction to Anticipation: Machine Intuition
True intelligence lies not in reaction speed, but in the ability to anticipate.
When a machine can predict what may happen in the next few seconds,
it has developed something akin to “intuition.”
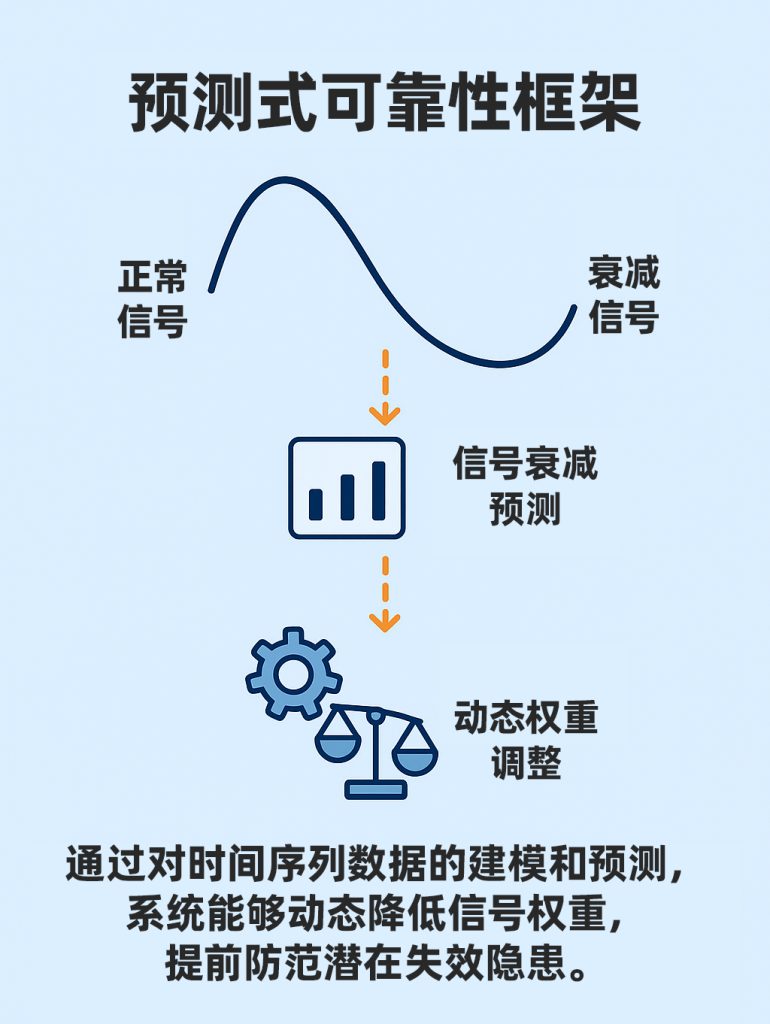
Through large-scale data training, the REVENTADOR platform
establishes time-series models and dynamic confidence bounds,
enabling the system to adjust its own parameters before anomalies occur.
For example:
Upon detecting a declining trend in satellite signal strength,
the system proactively increases IMU weighting;
when road feature ambiguity is identified,
the algorithm adaptively adjusts visual filter intensity.
This is “predictive reliability” —
the system begins responding to risk before it fully materializes.
Human intuition comes from experience. Machine intuition comes from data.
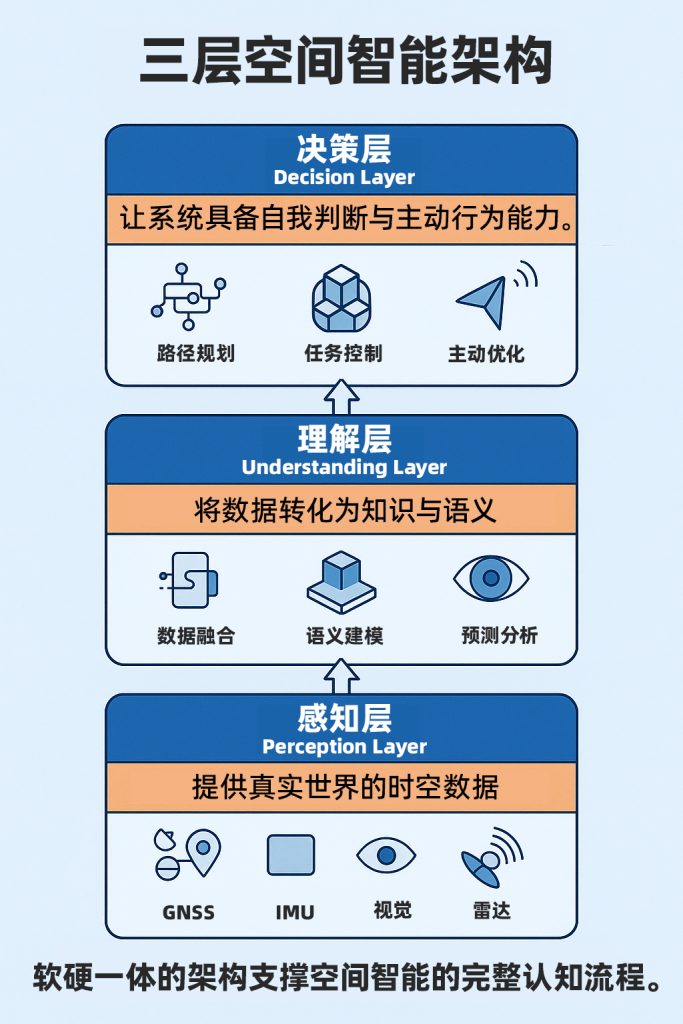
V. The Three-Layer Architecture of Cognitive Systems
The capabilities of a spatial cognition system can typically be organized into three layers:
- Perception Layer: Seeing the world. Comprising GNSS, IMU, vision, and radar, this layer delivers real-time information about the physical environment.
- Understanding Layer: Making sense of the world. Built from fusion algorithms and data models, this layer performs structured analysis of multi-source data to interpret environmental logic.
- Decision Layer: Engaging with the world. Combining task objectives with environmental state, this layer outputs optimal actions.
MCT’s integrated hardware-software architecture is built precisely around these three layers:
MOJANDA handles positioning; SUMACO provides attitude; REVENTADOR delivers understanding.
Together, they drive machines from “perception” toward “cognition.”
VI. The Future of Spatial Intelligence: From Navigation to Existence
When a machine truly understands the space it occupies,
its very mode of “existence” is transformed.
It is no longer a controlled object,
but an agent capable of acting autonomously within its environment.
The spatial intelligence systems of the future
will be more than “navigation tools” — they will be “cognitive entities”:
capable of learning, adapting, and expressing uncertainty.
This transformation means
spatial intelligence will no longer belong exclusively to vehicles, drones, or robots,
but will become a foundational capability for every intelligent agent with a physical presence.
Navigation belongs to the path. Cognition belongs to the world.
VII. Reflections and Outlook
“Where am I?” is a question of navigation.
“Why am I here?” is a question of cognition.
The trajectory of spatial intelligence
is to move machines from “computing accurately” to “thinking clearly.”
The integrated hardware-software system MCT is building
is laying the foundation for exactly this capability —
making positioning the starting point of cognition,
and understanding the basis for action.
When machines begin to understand space, they begin to understand themselves.
Further Reading
- Rodney Brooks. Intelligence Without Representation, MIT AI Lab, 1991
- Andy Clark. Surfing Uncertainty: Prediction, Action, and the Embodied Mind, Oxford University Press, 2015
- Paul D. Groves. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, Artech House, 2021
About MCT
MCT is an innovative company focused on attitude sensing and absolute positioning for the era of Physical AI. With artificial intelligence at our core, we follow a “data-driven, hardware-software integrated” strategy to develop and deliver comprehensive attitude sensing and absolute positioning solutions. Our products serve embodied intelligence, urban-area assisted driving, low-altitude economy, robotics, and smart device applications. Built on our proprietary automotive-grade BeiDou high-precision chips and modules, and integrating high-precision IMU, vision, and radar sensor technologies alongside large-scale data resources, MCT provides more reliable, safer, and more precise technical support for autonomous planning and automated control — continuously advancing the spatial awareness capabilities of intelligent platforms.
Want to learn more about MCT’s latest developments? Visit www.mctech.ai / www.mctai.cn, or follow our WeChat Official Account: 「毫厘智能 MCT」.