

1️⃣ 为什么 GNSS 需要“另一个自己”
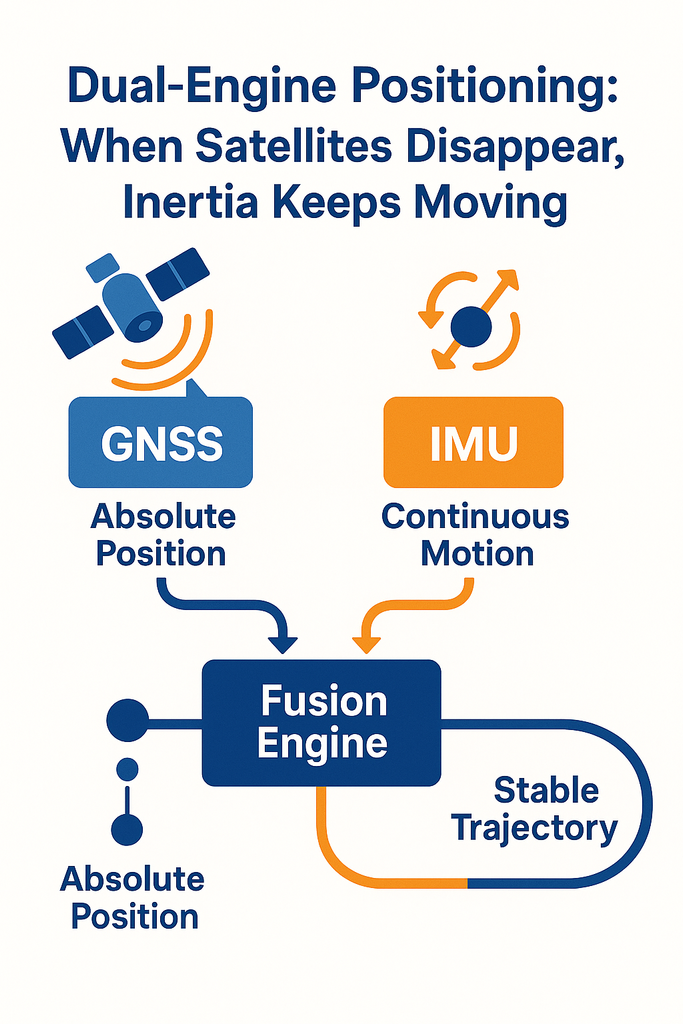
在开阔的天空下,GNSS 能精确告诉我们“我在哪里”; 但一旦进入隧道、林荫或城市峡谷,信号被遮挡、反射或失锁,定位的连续性便被打断。 这时,就需要另一个“不会迷路”的感知源接过方向盘——那就是 IMU(惯性测量单元)。
IMU 不依赖外部信号,通过陀螺仪与加速度计,实时测量设备的角速度与加速度,
能在短时 GNSS 信号缺失时继续计算位置与姿态变化。
它像一位“盲行者”,在黑暗中仍凭惯性与方向感前进。
2️⃣ 两种测量的互补关系
GNSS 与 IMU 在原理上截然不同:
- GNSS:基于外部信号,通过测距和时间同步计算位置;
- IMU:基于内部惯性,积分角速度和加速度求得姿态与位移。
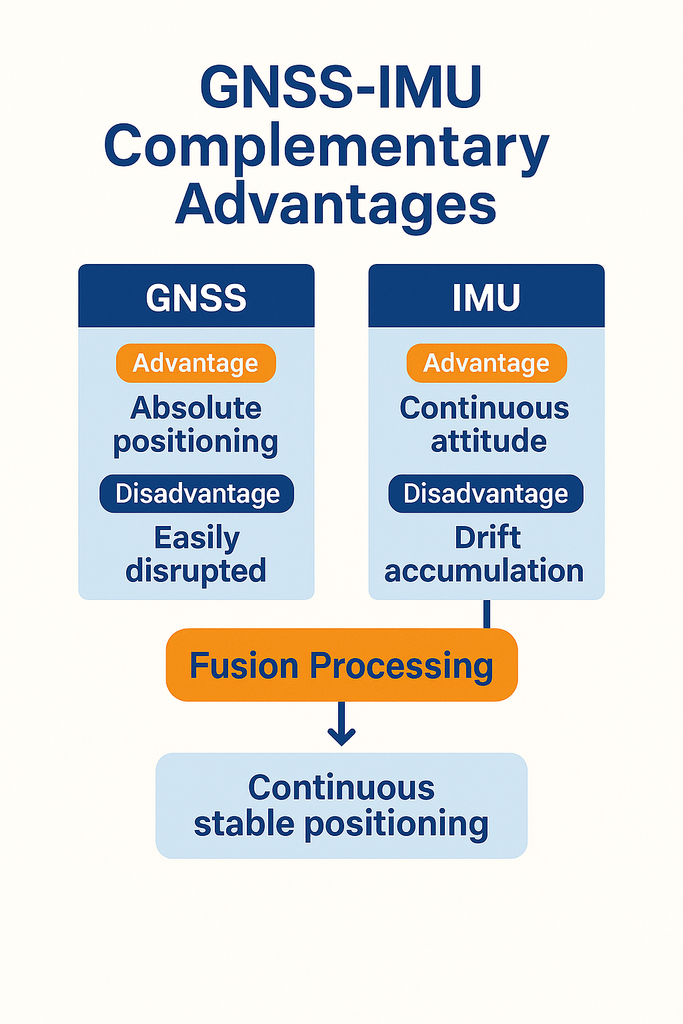
GNSS 优点是长期无漂移,但受环境影响大;
IMU 优点是短时高稳定,但误差随时间积累。
因此,它们是一对理想的互补——
GNSS 定义“绝对位置”,IMU 保持“连续姿态”,融合后,系统既“知道在哪”,也“知道如何动”。
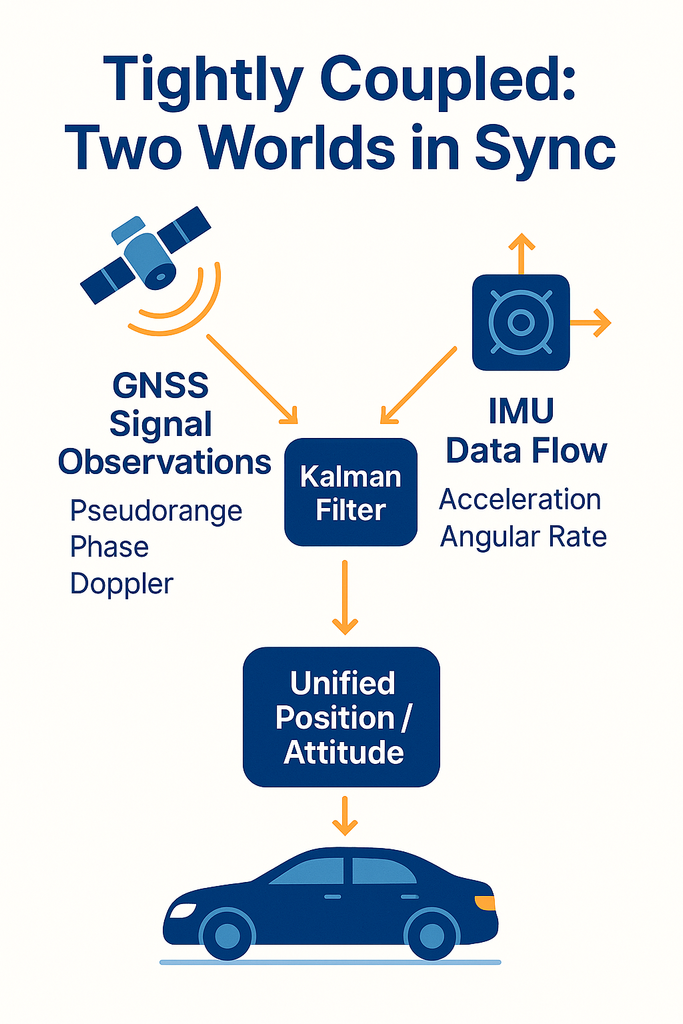
3️⃣ 紧耦合的意义:让两个世界在同一秒跳动
融合的关键,不只是数据叠加,而是时间与空间的统一基准。 在 MOJANDA 与 SUMACO 紧耦合架构中:
- GNSS 的授时信号(PPS) 作为时间主线;
- IMU 的惯性数据流 以相同时间戳标定;
- 两者在 REVENTADOR 平台上完成多维卡尔曼滤波融合,形成统一的动态模型。
这种结构被称为 “紧耦合(Tightly Coupled)”—— GNSS 不再只是提供定位结果,而是将原始观测量输入融合系统; IMU 也不再只是姿态传感器,而是时间连续性的“骨架”。 最终结果是:即使卫星数少于四颗、信号中断或多径严重,系统仍可维持稳定解算。
4️⃣ 从算法到可靠性:让融合更“聪明”
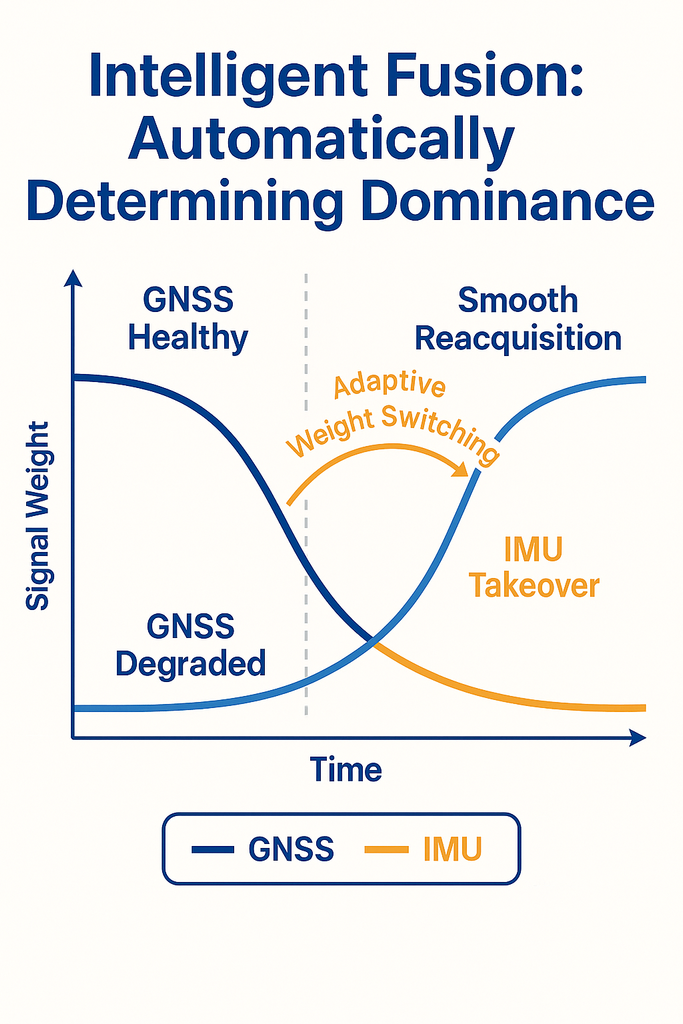
MOJANDA 的紧耦合融合算法不仅仅在物理层对齐数据,更实现了“智能选择”:
- 当 GNSS 信号质量高时,系统自动加权 GNSS;
- 当 GNSS 失锁或受干扰时,权重自动切换到 IMU;
- 当环境恢复时,再平滑切换回 GNSS 主导。
这套自适应权重机制结合了 AI 辅助滤波算法,能识别异常模式并提前预测漂移趋势,使系统在复杂环境中仍维持高达 99.8% 的轨迹连续性。
换言之,它不仅仅是融合,更像是协作—— 两个传感器相互校准、相互补充,共同定义一个可信、稳定、连续的空间秩序。
5️⃣ 当“位置”成为“感知”
在传统意义上,GNSS 只是一个坐标系; 但当它与 IMU 结合时,定位不再是静态结果,而变成了一个随时间演化的认知过程。 这正是空间智能的核心: 让机器不仅知道“我在哪”,还能理解“我是如何到这的”。
MOJANDA 与 SUMACO 的紧耦合结构,正是这一理念的实践者—— 它让定位系统成为一个感知-推理一体化的有机体。 这是从“精准定位”走向“智能理解空间”的关键一步。
关于 MCT 毫厘智能
MCT 毫厘智能是一家专注于 Physical AI 时代的姿态感知与绝对定位创新公司。我们以人工智能为核心技术,采用“数据驱动、软硬结合”的策略,开发并提供全面的姿态感知与绝对定位软硬件解决方案,服务于具身智能、城区辅助驾驶、低空经济、机器人、智能设备等领域。公司基于自研的车规级北斗高精度芯片和模组,融合高精度 IMU、视觉及雷达等传感器技术,结合海量数据,为自主规划和自动控制提供更可靠、更安全、更精准的技术支撑,持续提升载体的空间感知能力。 想了解更多关于 MCT 毫厘智能的最新动态?欢迎访问 www.mctech.ai / www.mctai.cn,或关注微信公众号「毫厘智能 MCT」。