引子:为什么飞机不会掉下来

现代客机的飞行控制系统极其复杂。
它有多重电源、多路总线、冗余传感器、备用控制律。
即使一个传感器失效、一个引擎停转、一个计算机宕机,飞机依然能稳稳飞行。
这是工程可靠性的最高境界—— 不是避免出错,而是在错误中生存。
在空间智能系统中,这正是我们所追求的目标。
真正的可靠,不是永不出错,而是出错后依然正确。

一、可靠性的第一层:硬件不死
可靠性,首先是物理层的。
MCT 的芯片与模组都采用车规级设计标准,
通过高温、高湿、高振、高冲击的耐久测试。
在 MOJANDA GNSS 芯片中,信号链采用多路隔离设计,防止单点失效;
SUMACO IMU 模组内嵌温度补偿与异常监测机制,
即使在极端环境下,也能维持稳定输出。
可靠,从来不是“坚固”,而是可预测的脆弱。 只有当系统知道自己会如何坏,它才有机会变得更好。

二、可靠性的第二层:算法自愈
硬件可以失效,但算法不能慌乱。
在 REVENTADOR 融合平台中,算法具备对自身状态的认知能力——
它能检测输入数据的异常模式,能在单源失效时动态调整权重,
甚至能根据历史特征自动重建解算模型。
这就像人体在受伤后激活免疫系统:
不是立刻恢复,而是逐步重建平衡。
在复杂环境中,这种“算法级自愈”让系统始终保持理性与秩序。

三、可靠性的第三层:系统协同
单个模组的可靠性有限,真正的可靠来自系统协同。
在 MCT 的软硬一体架构中,
MOJANDA 提供定位基础,SUMACO 维持姿态连续,REVENTADOR 进行多源融合,
三者形成一个“自我平衡的闭环生态”。
系统能在任一层级失效时,自动调用其他模块进行补偿与修正。
例如:
当 GNSS 信号异常时,IMU 接力;
当 IMU 漂移累积时,GNSS 与视觉修正;
当环境异常时,算法判断并重建权重矩阵。
这是可靠性的第三层次:系统自调与协同稳定。
四、可靠性的第四层:数据完好性(Integrity)
在工程语境中,“可靠”并不等同于“精确”。 一个系统可以高精度,却不一定可靠; 但一个可靠系统,必然具备数据完好性(Integrity)。
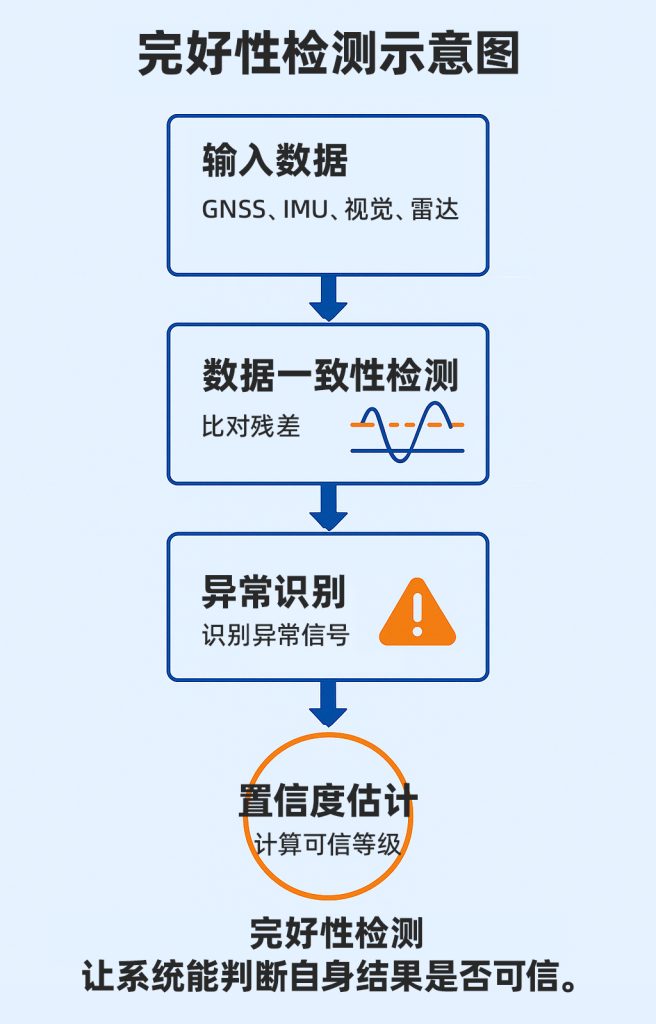
REVENTADOR 平台内置完好性检测模块:
它持续计算数据的内部一致性、噪声特征与概率边界,
一旦发现异常漂移或突变,就会触发报警与修正机制。
这种“数据自省能力”,让系统不仅能产生结果,还能解释结果是否可信。
未来,这种机制将进一步演化为“可置信度输出”——
不仅告诉你“我在哪”,还告诉你“我对这个结果有多自信”。
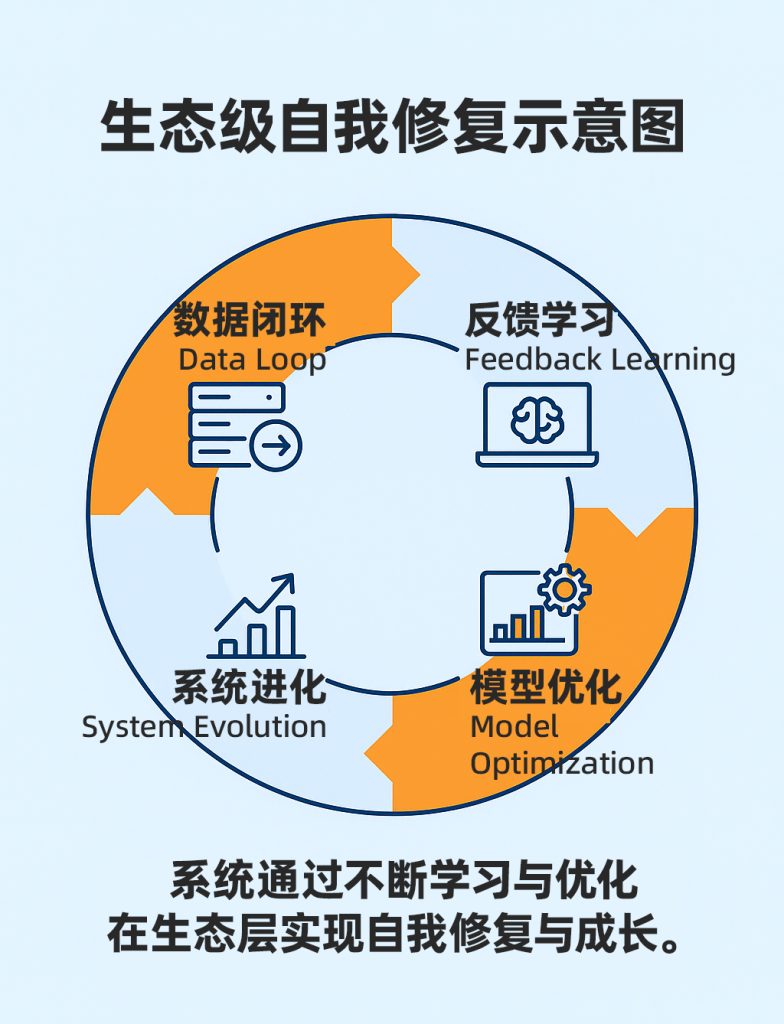
五、可靠性的第五层:生态演化
可靠性的最终形态,不再是单个产品的能力,而是一种生态协作行为。
当 GNSS、IMU、视觉、雷达、地图、AI 模型等多源数据形成闭环,
整个系统会表现出某种“生命力”——它能学习、能进化、能从错误中汲取经验。
这正是空间智能系统的“自我修复”雏形。
它意味着,未来的定位系统不再是“静态模块”,而是“动态生命体”。
每一次异常,都是一次学习;
每一次修复,都是一次进化。
可靠性不再是防御,而是成长。
六、思考与展望
可靠性的尽头,不是坚不可摧,而是柔韧与自省。
未来,空间智能系统将具备“心理层”的能力——能理解自身的不确定性,能主动求稳。
这将成为车规系统、机器人乃至具身智能的共同方向。
MCT 的使命,就是在可靠的基础上,让智能变得可理解、可信任、可持续。
稳定不是静止,而是持续的动态平衡。
延伸阅读
- NASA System Safety Handbook, Vol.2: System Safety Concepts
- Paul D. Groves:《Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems》
- Ross J. Anderson: Security Engineering: A Guide to Building Dependable Distributed Systems (Wiley, 3rd Edition, 2020)
关于MCT毫厘智能
MCT毫厘智能是一家专注于Physical AI时代的姿态感知与绝对定位创新公司。我们以人工智能为核心技术,采用“数据驱动、软硬结合”的策略,开发并提供全面的姿态感知与绝对定位软硬件解决方案,服务于具身智能、城区辅助驾驶、低空经济、机器人、智能设备等领域。公司基于自研的车规级北斗高精度芯片和模组,融合高精度IMU、视觉及雷达等传感器技术,结合海量数据,为自主规划和自动控制提供更可靠、更安全、更精准的技术支撑,持续提升载体的空间感知能力。
想了解更多关于 MCT 毫厘智能的最新动态?欢迎访问 www.mctech.ai / www.mctai.cn,或关注微信公众号「毫厘智能 MCT」。